Autonomous Cars

This demonstrator project provides a miniature, but highly capable self-driving car platform across the centre for research, development and important outreach and engagement around this pivotal technology.
Team Members
Robert Mahony
Australian National University (ANU), Australia
Rob Mahony is a Professor in the Research School of Engineering at the Australian National University and has been a Chief Investigator with the Centre since its inauguration in 2014. His research interests are in non-linear systems theory with applications in robotics and computer vision.
He wrote the seminal paper providing a clear exposition of non-linear complementary filters on the special orthogonal group for attitude estimation; an enabling technology in the early development of quadrotor aerial robotic vehicles. He was the first to provide a principled analysis for using optical flow of control of aerial robotic vehicles and was a coauthor on the first experimental paper that demonstrated landing of a quadrotor vehicle on a textured but featureless moving surface. In 2016, Rob was named a Fellow of the IEEE, recognising his contribution to the control aspects of aerial robotics.
Gavin Suddrey
Queensland University of Technology (QUT), Australia
Gavin graduated from QUT with a Bachelor in Games and Interactive Entertainment (Software Technology) in 2011, and a Bachelor of Information Technology (Honours I) in 2014. He was previously a PhD student within the Robotics and Autonomous Systems group at QUT with Frederic Maire. Gavin returned to QUT in 2017 as a software engineer on the humanoid robotics project. In his role he worked on expanding the general capabilities of the Pepper robot, primarily through the use of vision, whilst also working to assist both researchers and students within the Centre and wider QUT community in utilising Pepper within their own research.
In August 2019, Gavin joined the Centre as a research engineer and is based in the Centre headquarters at QUT.
Steve Martin
Queensland University of Technology (QUT), Australia
I graduated with a Bachelor of Mechatronics from QUT in 2009 and a former PhD student at the original QUT Cyphy Lab with Gordon Wyeth and Peter Corke. I rejoined QUT and the Centre in February 2016 as a research engineer to assist with the engineering requirements as the Centre grew. Within the group I work on a huge range of projects from general day to day robot maintenance such to software development or electrical design work.
James Mount
Queensland University of Technology (QUT), Australia
James Mount holds an Honours Degree in Mechatronics Engineering and is a current Robotics PhD Candidate at the Queensland University of Technology. His research on vision-based localisation is applicable to several domains, including self-driving vehicles. Improving education through the use of robotics is an additional interest of his.
He has also built several robots throughout his career, some for his studies, others just for enjoyment. These robots include line followers, soccer bots, automated RC cars with vision systems, as well as other various smaller projects including timing gates. He also successfully ran a KickStarter Campaign that delivered educational robots at the end of 2016.
Project Aim
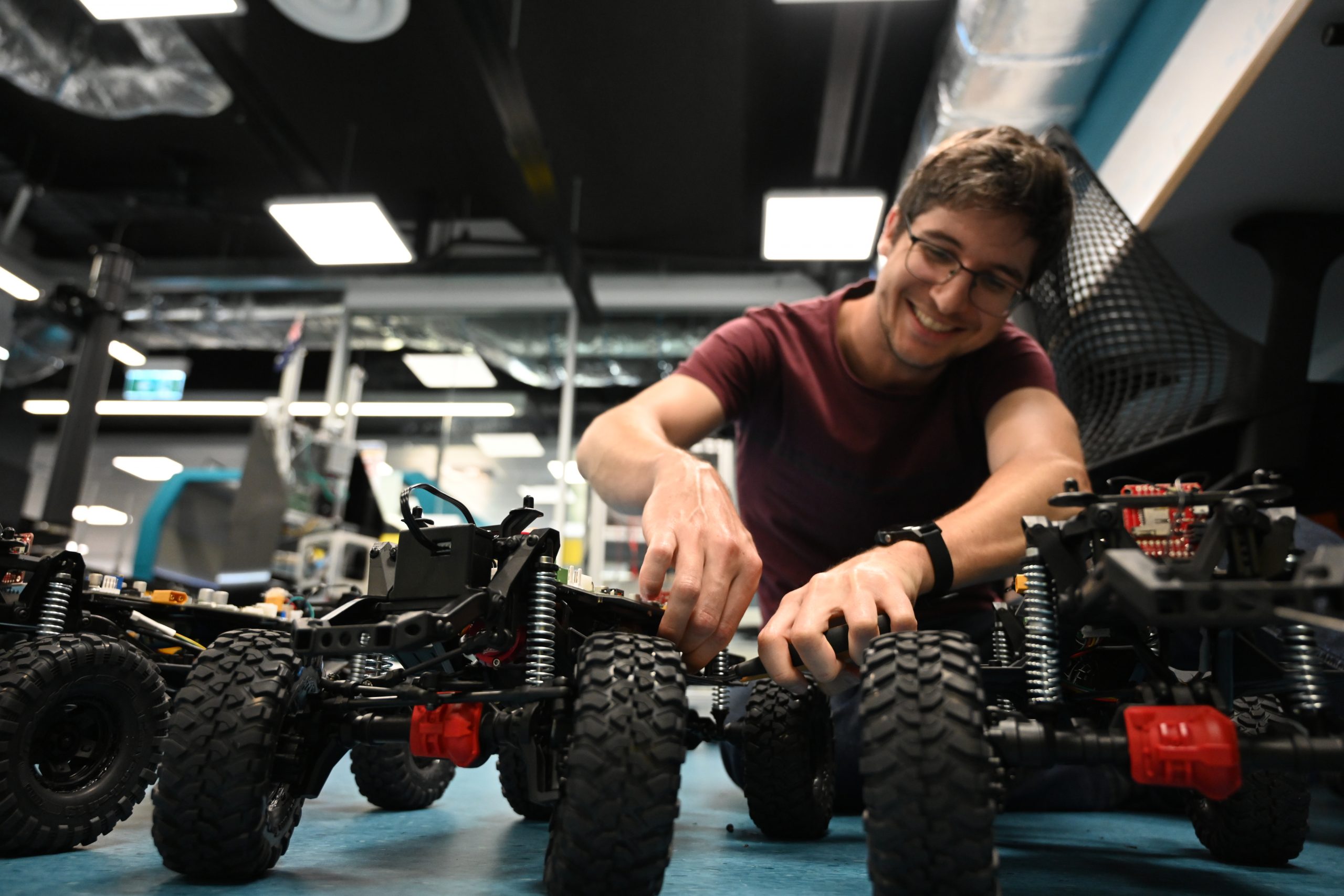
The race towards developing autonomous vehicles is one of the biggest technological challenges of today. Key to their feasibility is the ability of these robot cars to intelligently perceive and understand the environment around them in order to make appropriate and safe driving decisions.
This demonstrator project provides a miniature, but highly capable self-driving car platform across the centre for research, development and important outreach and engagement around this pivotal technology. Robotic vision is the key to success because these autonomous vehicle platforms rely so heavily on visual perception, and their ability to intelligently process and understand that perception.
Key Results
In 2019, the project team completed development of a fleet of four miniature autonomous vehicles, that have been distributed to all Centre nodes – QUT, University of Adelaide, Monash University and The Australian National University.
The team, based at QUT, ran a two-day demonstrator workshop attended by researchers from other nodes. The core team of James Mount, Gavin Suddrey and Steve Martin developed and distributed some core car capabilities including mapping and lightweight closed-loop visual control techniques.
The miniature autonomous car also made a number of public appearances during the year, including an all-day meet and greet in front of thousands of members of the public at Robotronica 2019.
The platform also formed a key part of the Centre’s training mandate. It was used to train 10 undergraduate students during research projects, who have worked on further progressing the miniature autonomous car’s capabilities including better mapping systems and a teach-and-repeat navigation capability.
Activity Plan for 2020
- Continue to support Centre Research Projects as a key demonstrator for testing and applying research discoveries.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}