Autonomous Cars

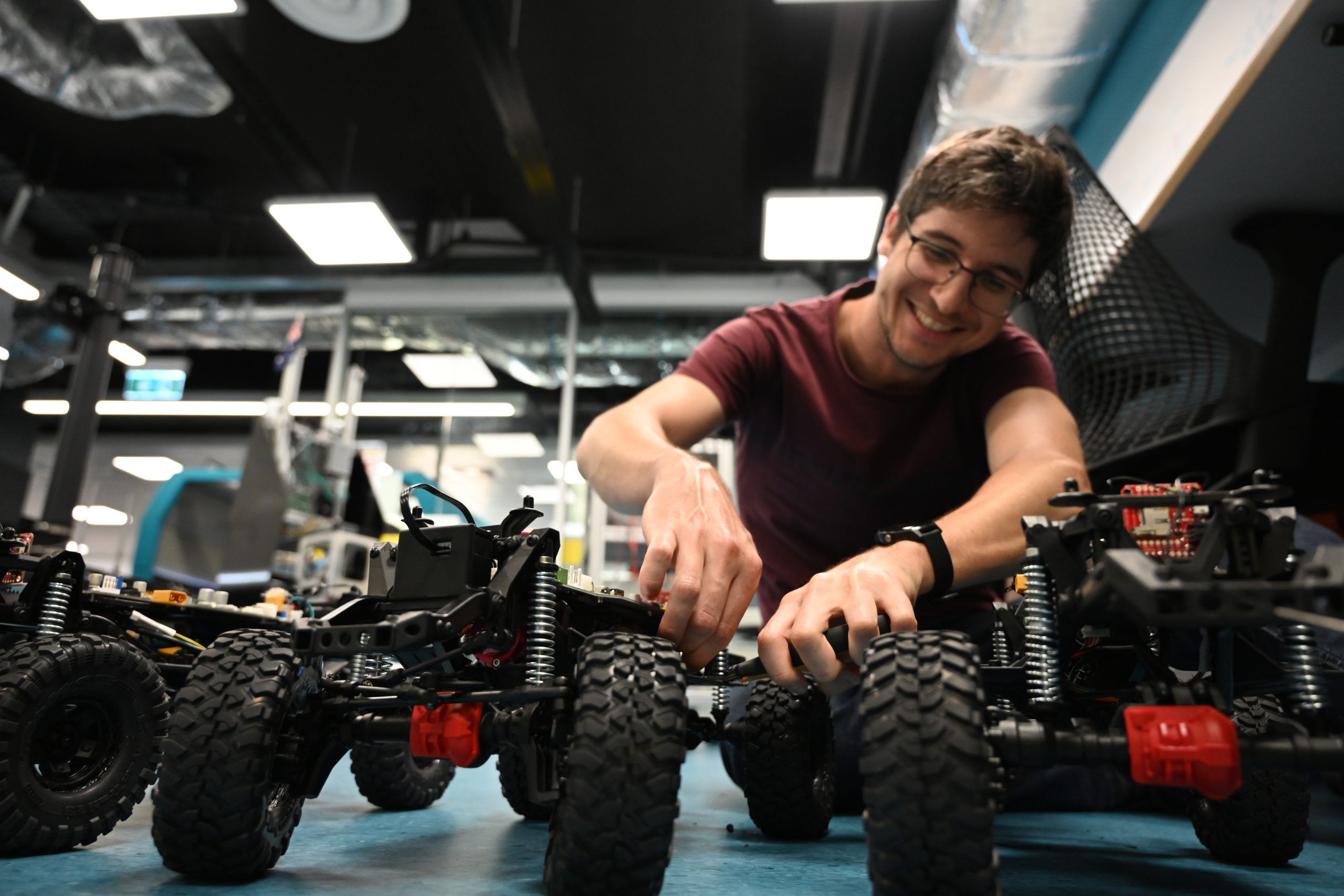
This demonstrator project created a highly capable small-scale self-driving car platform that we call ‘Carlie’. These have been used across the centre for research, development and important outreach and engagement. Highlights were two autonomous vehicle challenges centred around demonstrations of centre capabilities, run at the final RoboVis 2020 event, utilising vehicles at each of the nodes or remotely at QUT.
Team Members
James Mount
Queensland University of Technology
James is a robotics engineer, engineering educator and technology communicator. He enjoys pushing the boundaries of technology by designing and building robotic systems and assessing their capabilities in real-world applications. James is also passionate about creating and presenting engaging demonstrations to teach others about technology.
James has worked with universities, governments and the private sector for over five years and completed several highly-successful projects. Some of these include, assessing the readiness of the Australian roads for autonomous vehicles on a multi-million dollar government contract. As well as the development and manufacturing of a fleet of mini-autonomous vehicles that are used for research and education.
James’ roles as a sessional academic at QUT and as a PhD student as part of the Centre has allowed him to explore his passion for education. For the past 10 years, he has taught engineering at QUT and developed engaging demonstrations showing off upcoming robotics technology. Some of his career highlights include guest-starring in several children’s television shows and presenting an interactive demonstration about autonomous vehicles to an audience of a thousand people.
He currently holds an Honours Degree in Mechatronics Engineering and is waiting for his PhD Final Thesis Examination reviews.
Gavin Suddrey
Queensland University of Technology
Gavin graduated from QUT with a Bachelor in Games and Interactive Entertainment (Software Technology) in 2011, and a Bachelor of Information Technology (Honours I) in 2014. Since 2014 Gavin has worked in numerous roles at QUT, including as an Associate Lecturer within the school of Electrical Engineering and Computer Science; a Software Engineer with the Humanoid Robotics Project; and most recently as a Research Engineer with the Australian Centre for Robotic Vision. Gavin is also a PhD student studying part-time under Frederic Maire within the School of Electrical Engineering and Robotics.
Steve Martin
Queensland University of Technology
Steve graduated with a Bachelor of Mechatronics from QUT in 2009 and was a former PhD student at the original QUT Cyphy Lab with Gordon Wyeth and Peter Corke. He rejoined QUT and the Centre in February 2016 as a research engineer to assist with engineering requirements as the Centre grew. Within the group Steve works on a huge range of projects from general day to day robot maintenance, software development and electrical design work.
Thomas Rowntree
University of Adelaide
Tom is a Research Programmer based at the University of Adelaide. He joined the Centre in February 2017 and was a key member of Team ACRV who competed and won the 2017 Amazon Robotics Challenge in Japan. Tom completed his Bachelor of Engineering in Mechatronics, Robotics and Automation Engineering in 2012.
Sam Bahrami
University of Adelaide
Sam is a Research Programmer at the University of Adelaide where he also gained a Bachelor of Engineering (Honours) and a Bachelor of Mathematical & Computer Sciences. As a research programmer, he works on robotics, machine learning, and vision and language problems within the Centre. Sam has been part of the Centre since November 2018.
Pieter van Goor
Australian National University
Pieter completed his Bachelor of Engineering (Research & Development) (Honours) and Bachelor of Science at ANU in 2018, majoring in Mechatronics and Mathematics, respectively. In 2017 he worked as a student intern at Data61 at CSIRO in Brisbane. His engineering honours thesis, completed in 2017, studied non-linear multi-agent system formation control using unit quaternions.
In October 2018 Pieter commenced his PhD in non-linear observer theory under the supervision of Rob Mahony at ANU. He is researching geometric observers for non-linear control problems, such as SLAM, with a focus on applying Lie group symmetries and implementation on mobile robots. In this research, he is also looking at novel hardware options for implementing these systems.
Yonhon Ng
Australian National University
Yonhon joined the Centre as a Research Fellow at the ANU in January 2019. He works on the Fast Visual Motion Control project under the supervision of Professor Robert Mahony. He completed his PhD degree at ANU under the supervision of Associate Professor Jonghyuk Kim, Professor Brad Yu and Professor Hongdong Li. He also obtained his Bachelor of Engineering (R&D) at ANU and was awarded a University Medal.
Yonhon’s research interests include equivariant observer, 3D computer vision and robotics. He enjoys playing badminton, fishing and cooking during the weekend.
Akansel Cosgun
Monash University
Akansel Cosgun is a Research Fellow with the Centre at Monash University. He holds a PhD in Robotics from Georgia Institute of Technology.
Akansel is interested in developing robotic systems that can do useful tasks in the real world. His research interests include robot manipulation, machine learning, and human-robot interaction.
Project Aim
The race towards developing autonomous vehicles is one of the biggest technological challenges of today. Key to success is the ability of these robot cars to intelligently perceive and understand the environment around them in order to make appropriate and safe driving decisions. This demonstrator project delivered four miniature, but highly capable, self-driving car platforms – ‘Carlie’ – that were used across the Centre for research, development and important outreach and engagement around this important new technology.
Key Results
In 2020, the project team developed an online user guide for Carlie to ensure that researchers at each node had all the relevant information to enable them to use Carlie as a demonstrator in a highly independent manner without requiring assistance from the Project team beyond the life of the Centre. Additionally, the repository has been set up to capture important discoveries made by the user community and provided all of the source code and design files used in the project.
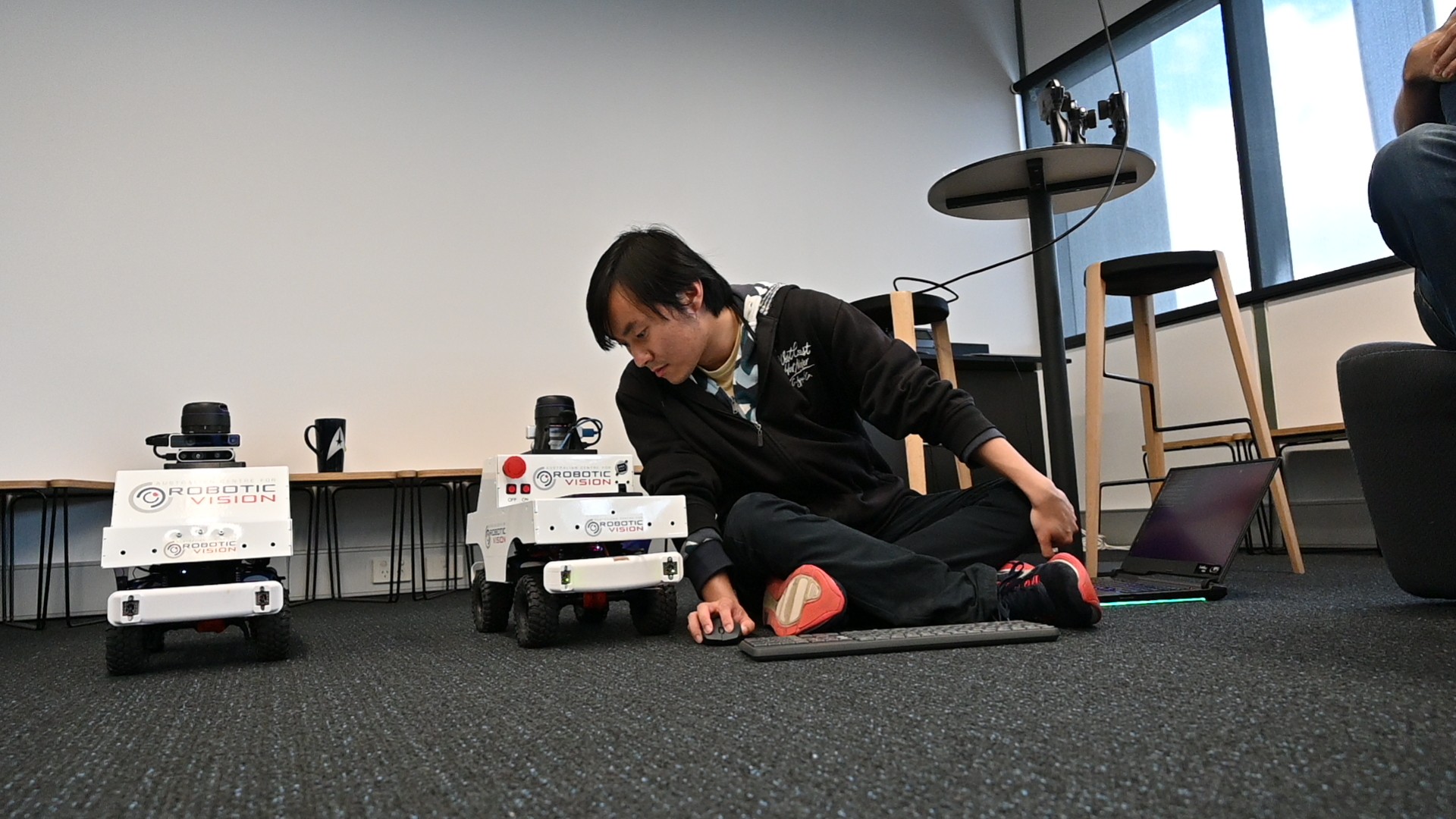
The car was also used for two demonstrator challenges at the Centre’s final annual symposium. The first was a showcase, an opportunity for each Centre node to demonstrate the research activity that had occurred on Carlie at their laboratory during 2020. Demonstration highlights from the four nodes were autonomous vineyard inspection, automatic parking systems and automated terrain traversability estimation. The second was a Vision Challenge (Hack-a-thon) where Centre researchers had to develop a vision algorithm to help Carlie autonomously navigate a route that she had previously driven – known as teach and repeat. In the first stage Carlie was manually driven along a route, collecting image and odometry data along the way. Carlie was then returned to the starting position and researchers would then run their own vision algorithm, comparing the new images against those taken during the teach phase, in order to determine where they were. Control commands were then generated to enable Carlie to autonomously traverse the route.
The cars were also used in outreach and engagement throughout the year, including appearing in a feature video “Cars of the Future” on Juiced TV.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}